On Planes and Plesiosaurs
So, how does an aerospace engineer end up building a robotic plesiosaur?
Well, I was interested in science from a young age. In fact, my favourite books were all about science, maths or engineering.
As I learnt more about science and engineering, I became increasingly amazed at the wonders of the natural world and particularly
the incredibly efficient engineering solutions found in nature.
My desire to understand how things worked led to my undergraduate and Masters degrees in aerospace engineering from the University of Sheffield,
which led me to a PhD in Biomechanics at Southampton University, looking at the Hydrodynamics of Plesiosaurs.
You might think planes and plesiosaurs have little in common but once you realise that wings and flippers can function in very similar ways
and they both move through a fluid (air/water), it doesn't take long to see that they have some important characteristics in common.
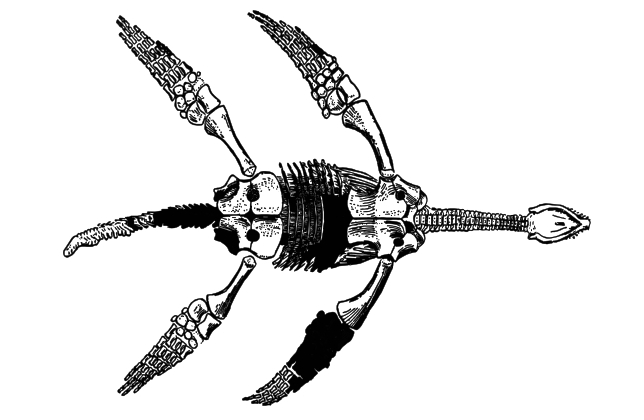
My research began with a detailed analysis of plesiosaur fossils and involved a combination of aerospace engineering, robotics, and palaeontology
to discover the secrets of these prehistoric beasts. As we were primarily interested in how the plesiosaur used its flippers,
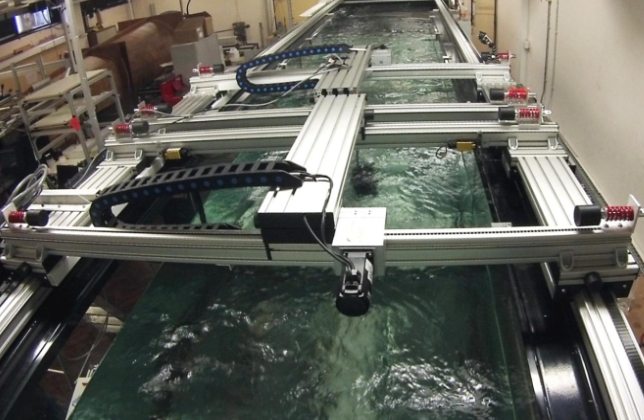
we built a flipper system mounted on a gantry, without a head or tail.


Without teamwork and collaboration, very little science would ever get done. My thanks go to Bharathram Ganapathisubramani, Gareth Dyke, Gabriel Weymouth, Darren Naish and Colin Palmer for leadership and support during my PhD.
The team's findings settled a long-standing debate about how plesiosaurs used their flippers. We found that plesiosaurs used a tandem flipper propulsion system, meaning the four flippers work together to push them through water. This system is unique because all other animals with flippers, like penguins and turtles, only use the front two for propulsion, and the rear flippers or feet for steering. This resulted in a number of peer-reviewed scientific papers.
The flipper system was a simplified prototype of the fully-formed swimming robot 'FLIP' - the world’s first scientifically-accurate plesiosaur robot - which recently appeared in the BBC programme 'Attenborough and the Giant Sea Monster'. In fact, Sir David Attenborough was at the controls for FLIP's first swim.
After my doctorate, I began working at the Structural Dynamics group in Imperial’s Department of Mechanical Engineering,
supporting researchers working on aeroplane engines and the structural effects of vibration.
Keen to continue bringing plesiosaurs to life in my spare time, Project FLIP really took off when I met James Hogg,
who had recently opened the Yorkshire Natural History Museum in Sheffield, and who agreed to support the work.
FLIP is currently helping me with further study of plesiosaur locomotion in the hydrodynamics lab at Imperial College London.
Watch the incredible BBC documentary and see FLIP's maiden voyage with Sir David at the controls...
Attenborough and the Giant Sea Monster
...available to watch on BBC iPlayer

You can find summaries of our research relating to the project background, the experimental methods, the findings - results and conclusion.
There are also sections containing all of the links to research papers, YouTube videos and downloads.
Background
Why research Plesiosaur Hydrodynamics?
Findings

Our main results and conclusions
Downloads
Download outreach posters
My heartfelt thanks to everyone who has assisted so far in my research.
To my four PhD supervisors,
Prof Bharath Ganapathisubramani,
Dr Gareth Dyke,
Dr Gabriel Weymouth
and
Dr Colin Palmer,
who each provide unique perspectives and advice.
Also to Phil Oxborrow, Simon Klitz, Liam Adams, and Alessandro Pontillo, who helped to design, construct, and program the experiment.
Also many thanks to
Darren Naish
and Richard Forrest who provided me answers to all sorts of questions, and to Sandra Chapman and Dennis Parsons who granted me access to specimens.
Not forgetting my friends and family who have constantly provided support throughout my life.
Sponsors




Media
Articles relating to the BBC programme Attenborough and the Giant Sea Monster.


A range of articles, podcasts and TV programmes in connection with my PhD research.










Published Research

Institutions
The following institutions have all helped fund or have facilitated my research. Please note that inclusion of organisational logos on this site does not imply an ongoing relationship or any kind of approval or endorsement of my work by that organisation.

Completed PhD at Southampton

Research part-funded by ERC

Continuing research at ICL

Research part-funded by EPSRC